|
Symbolic dynamics and codes
Genesis Dynamical systems appeared at the beginning of XVIII
century following the Newton’s description of dynamics in physics. The
motion is governed by a system of differential equations. The typical
example here is the motion of the solar system, where the equilibrium
between gravity and centrifugal force is attained. This discovery
triggered a rapid development of methods of solving differential equations
which became the main subject of mathematics for almost two centuries. The
names of Euler or Jacobi must be mentioned here. In some cases explicit
motion equations have been found, like in the case of two celestial bodies
(Newton himself). Powerful tools like complex analysis and Fourier
analysis have been developed to deal with more and more difficult
differential equations. Nevertheless, finding explicit motion equations turned
out impossible except for only very few elementary cases. This difficulty
challenged mathematicians and physicists at the end of the XIXth century
to try a more abstract approach, i.e. to search for answers to some
questions concerning the motion without knowing the explicit equation. The
best examples of such results are the Poincaré
recurrence theorem and the Ergodic Theorems by Birkhoff and von Neumann.
No wonder that these very abstract theorems (nowadays known and quoted to
in their modern abstract formulations) have been first proved only for
smooth dynamical systems in the Euclidean space or on a Riemannian
manifold. One of the typical subjects investigated by that time
was describing geodesic curves on a Riemannian manifold. Such curves are
solutions to certain differential equations for minimizing length of a
path joining given points on the manifold and they appear naturally as
trajectories of moving particles. Reviewing Journal de Mathématiques
of 1898 we can find works by Poincaré,
Laurent, Liapunov, Jordan and the like. On of them is Hadamard’s paper
concerning geodesics on Riemannian manifolds with negative curvature. We are used to think about symbolic dynamics as of
investigating binary sequences, blocks and codes, which has more to do
with information theory rather than classical description of smooth
motion. But it is the XIXth century paper by Hadamard where the origins of
symbolic dynamics can be found. Let’s take a closer look. Hadamard considers homotopy classes of curves. He proves that there
exists a finite set of closed curves G={g1,
g2, ... ,gn},
such that each class represents traversing these curves in a particular
order, in other words
it
is described by a double
infinite sequence
A = ...
a-1, a0,
a1,...
(ai ÎG). Next he proves that every class contains exactly one geodesic. By a
certain additional assumption on the shape of the manifold this
establishes a 1-1 correspondence between all bounded geodesics and all
double infinite sequence over the alphabet G. For a detailed explanation of Hadamard’s idea we shall
use the simplest manifold of negative curvature with nontrivial set of geodesics.
Below is a
computer generated picture of such a manifold. We can distinguish three
regions which we call saddles
and components extending to infinity which we call cones. Suppose we start drawing a geodesic from a saddle. We are
free to choose the initial direction within the range of 180°. If we choose a
direction going to much left or right then the geodesic will climb one of
the cones and escape to infinity. The same holds for central directions.
Thus we are left with two intervals of directions I1
and I2
going toward two remaining saddles. The saddles are sensitive to small
changes of directions, i.e. changing the initial direction within the
interval I1 we can
obtain the full range of 180° on the second saddle. Again, the extreme and middle directions escape to
infinity, hence from I1 we
select only two smaller subintervals. The same holds for I2. And so on. It is now seen that the set of initial
directions which do not escape is a classical Cantor set, and since we
have two choices on each saddle (left and right), every such geodesic can
be coded by an infinite sequence over two symbols {l
, r}.
In fact, there are two Hadamard’s basic closed curves for this
manifold.
0-1-10 -1001-10010110-1001011010011001-... What is important, Morse introduced a completely new abstract approach to
the subject. He was able to get rid of differential equations and use
combinatorial tools such as blocks, patterns, codes, and substitutions.
This is why Morse is being called the discoverer of the modern symbolic
dynamics. By that time however he has not yet realized the real value of
his novelty. In his paper the nonperiodic minimal flow is still
interpreted as a certain geodesic. But in 1938 with cooperation with Gustav
Arnold Hedlund he writes a paper entitled „Symbolic Dynamics”
fully devoted to abstract symbolic systems. Cellular automata Currently symbolic dynamics has grown to a large area of investigation.
It includes new fields such as the theory of cellular automata,
information theory, theory of error correcting codes and other applied
topics. Let me explain the idea of a block
code. It was proved by Hedlund already in 1969 that every factor
map j from one symbolic flow (X,S) to another (Y,S)
must be generated by a mapping
F:
S2r+1®S, (the parameter r is called
the radius of the code) by the formula: j(x)(i)
= F(x[i-r, i+r]). The theory of such codes (called cellular automata)
was introduced in the forties by von Neumann and Ulam. But its meaning
increases after 1969. Hedlund formulated several conditions for the map j generated by the code
to be surjective with respect to the full shift (SZ,S).
Analogous criteria for subshifts are currently a subject of research.
Similarly, the dynamics of such maps are being investigated. Let us
mention the results by Gilman (1987) where classification of codes with
respect to properties such as expansiveness, sensitivity and
equicontinuity is given, and by Hurley (1990) where codes are classified
by the size and quantity of attractors. Finally, P. Kůrka
(1994) investigates intersections of classes arising from the two above
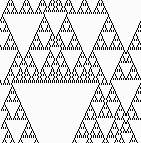
classifications. For example, let us consider a code over two symbols
{0, 1}:
Below
is we see consecutive images by iterating this code starting from the
sequence containing all zeros except a single digit 1 (zeros are replaced
by dashes).
What we see resembles the
famous Sierpinski triangle. The picture becomes even more complicated if
we start with a randomly chosen 0-1 sequence: As
mentioned above, not much is known about the dynamics of such codes in the
general case.
It
is well known that the shells grow along one edge by building up one row
of cells each period of time. Designs like these will appear when some of
the cells will contain pigment and other not. It was assumed by the
biologists that the design of the whole pattern is encoded genetically and
passed from one generation to another. Next there should exist a mechanism
allowing to realize the pattern by controlling the pigmentation of each
cell during the snail’s entire life according to the global genetic
plan. They were expecting to find some kind of a hormone carrying the
information individually to each new growing cell. But soon it turned out
that such hormone does not exist. All hormones are spread evenly along the
edge of the shell, so only horizontal straps as on the next picture can
be produced by this method. The solutions was found only after consulting
the subject with specialists working with codes and automata. They
recognized that the pattern must follow simple block codes, in most cases
of radius 1. We can compare the shells with iterates of appropriately
selected block codes.
Thus,
it became clear that there is no global design stored in the genes. The
pattern on the shell appears automatically. The new built cell is filled
with pigment or not depending on the pigmentation of three neighboring old
cells. A simple chemical mechanism suffices to realize such dependence. Another example leading to an application of block codes is the so called ”firing squad problem”. The code can be interpreted as a system of communication between soldiers in which each soldier in the squad receives signals from his two neighbors (or one if the soldier occupies one of the extreme positions in the squad). The code should lead to simultaneous firing of all soldiers and it should not depend on the number of soldiers, i.e. the same code should work with squads of different sizes. There exist many solutions to this assignment which is often used as an exercise at programming courses. But it also has a more practical application. Namely it can be used in computer networks to synchronize certain actions of all elements of a net, the number of which is a priori unknown. This example can give us an idea how useful symbolic dynamics can be. Most sophisticated methods of theoretical research often combined with numerical investigation find direct application in advanced technology via information theory, theory of error correcting codes, neural networks designing or genetic codes. Let me only mention the obvious fact that receiving satellite TV broadcasting would not be possible without codes. |